新聞中心
產品中心
聯系我們

深圳市東么川伺服控制技術有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區民治街道樟坑社區青創城A棟B502
步進電動機的閉環伺服控制說明
發布時間:2020-09-11 08:23:26
開環驅動的步進電機系統成本低,定位精度較高,低速輸出力矩大,掉電時有定位力矩,但也有一些不足。開環控制使系統存在振蕩區,在使用時必須避開振蕩點,否則速度波動很大,嚴重時可能導致失步。同時,起動受到限制。一般要通過控制外加的速度給定按一定的升速規律實現起動,必須有足夠長的升速過程。這導致它在速度變化率較大的場合的使用受到了限制。另外,抗負載波動的能力較差。如果負載出現沖擊轉矩,電機可能失步或堵轉。所以一般不能滿載運行,必須留有足夠的余量。這導致電機的容量得不到充分應用。開環控制一般無法實現有效的功角控制,定子電流中有很大的無功電流成分,驅動電流過大,加大了電機的損耗,所以它的效率一般較低。
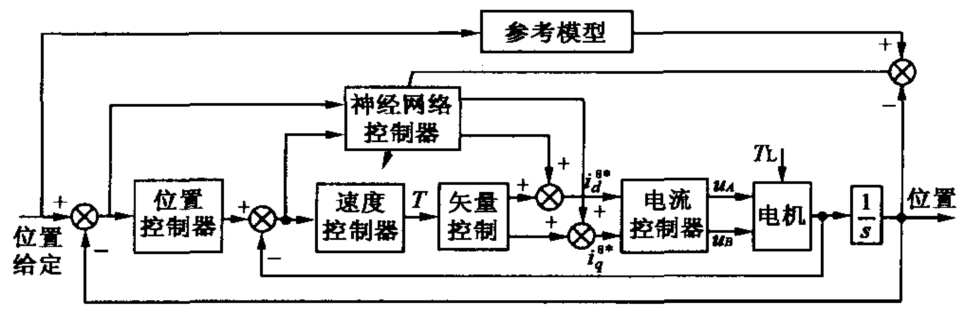
隨著工業應用的不斷深入和相關技術的發展,人們對步進電動機應用系統提出了越來越高的性能要求。閉環伺服控制運行方式從根本上解決了震蕩和失步問題,實現了繞組電流的有效控制,提高了效率,拓寬了步進電動機運動控制系統的應用領域。圖1給出了一種步進電動機矢量控制位置伺服系統的結構框圖。
該系統采用神經網絡模型參考自圖1步進電動機矢量控制位置伺服系統框圖適應控制對系統中的不確定因素進行實時補償,通過最大轉矩/電流矢量控制實現電機高效控制。步進電動機閉環伺服控制通常采用高性能的DSP芯片作為控制器,圖2給出了一種步進電動機閉環伺服系統的硬件構成示意圖。
隨著工業應用的不斷深入和相關技術的發展,人們對步進電動機應用系統提出了越來越高的性能要求。閉環伺服控制運行方式從根本上解決了震蕩和失步問題,實現了繞組電流的有效控制,提高了效率,拓寬了步進電動機運動控制系統的應用領域。圖1給出了一種步進電動機矢量控制位置伺服系統的結構框圖。
該系統采用神經網絡模型參考自圖1步進電動機矢量控制位置伺服系統框圖適應控制對系統中的不確定因素進行實時補償,通過最大轉矩/電流矢量控制實現電機高效控制。步進電動機閉環伺服控制通常采用高性能的DSP芯片作為控制器,圖2給出了一種步進電動機閉環伺服系統的硬件構成示意圖。
圖1 步進電動機矢量控制位置伺服系統框圖
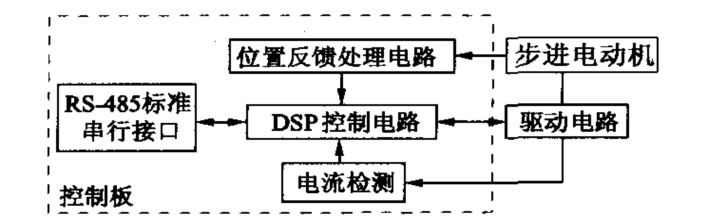
圖2 系統硬件結構表示意思圖
- 上一篇:步進電動機的類型與內部構造圖介紹
- 下一篇:深圳東么川國慶節中秋節放假通知!
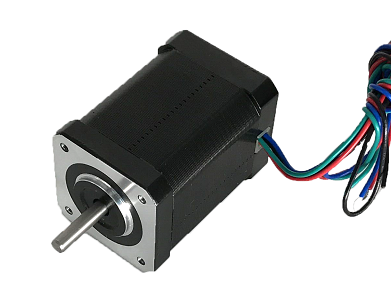
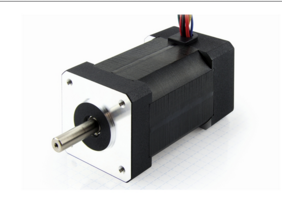
產品推薦:兩相步進電機




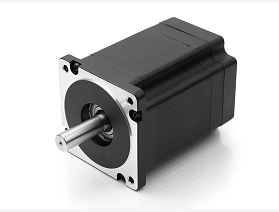
產品推薦:無刷電機






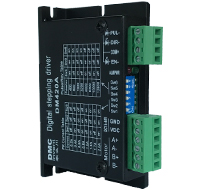
產品推薦:兩相步進驅動器



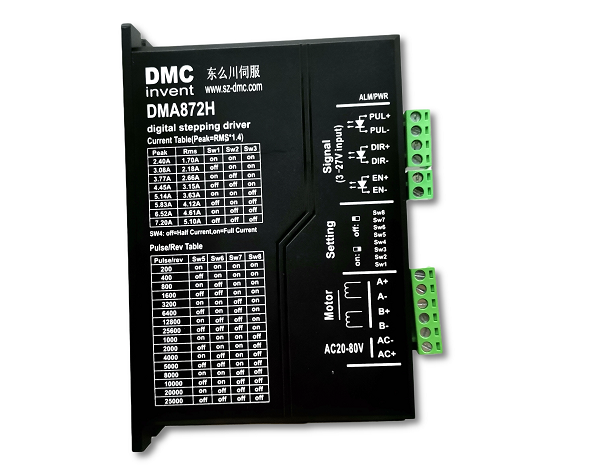



產品推薦:直流無刷驅動器






 地址 ADDRESS
地址 ADDRESS