- >>兩相步進(jìn)電機(jī)
- >>無刷電機(jī)
- >>三相步進(jìn)電機(jī)
- >>行星減速機(jī)
- >>直流無刷電機(jī)
- >>兩相步進(jìn)驅(qū)動(dòng)器
- >>直流無刷驅(qū)動(dòng)器
- >>三相步進(jìn)驅(qū)動(dòng)器
- >>直流無刷伺服驅(qū)動(dòng)器
- >>韓國GGM電機(jī)減速機(jī)

深圳市東么川伺服控制技術(shù)有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區(qū)民治街道樟坑社區(qū)青創(chuàng)城A棟B502
伺服電機(jī)控制過程中發(fā)生的問題和解決方法
發(fā)布時(shí)間:2021-09-01 08:18:40
伺服電機(jī)應(yīng)用問題
在整個(gè)伺服電機(jī)運(yùn)轉(zhuǎn)過程中,是一個(gè)非常復(fù)雜的電磁能量轉(zhuǎn)換、機(jī)械能轉(zhuǎn)換的過程。每個(gè)細(xì)節(jié)都將影響整個(gè)運(yùn)行過程的穩(wěn)定性。比如:脈沖控制信號(hào)線、動(dòng)力線、編碼器線接觸不良;伺服驅(qū)動(dòng)器參數(shù)設(shè)置不良;電機(jī)編碼器受損;脈沖控制信號(hào)被干擾;伺服電機(jī)連接傳動(dòng)機(jī)構(gòu)松動(dòng),都會(huì)導(dǎo)致伺服控制系統(tǒng)的穩(wěn)定性。甚至導(dǎo)致失控情況發(fā)生。依據(jù)多年經(jīng)驗(yàn),伺服控制過程中發(fā)生的問題和解決方法如下:
2.6 電機(jī)編碼器工作異常
【發(fā)生的現(xiàn)象】
a, 伺服驅(qū)動(dòng)器上電報(bào)警(有關(guān)編碼器故障)
b, 電機(jī)實(shí)際運(yùn)行位置相比較控制位置出錯(cuò)(或多或少)
c, 電機(jī)“飛車”(失速);
【解決措施】
a, 更換編碼器連接線(線材接觸問題,或者接頭問題)
b, 更換伺服電機(jī)(可能是電機(jī)編碼器異常,或者磁編碼器硬件問題)
2.7 電機(jī)與傳動(dòng)機(jī)構(gòu)連接松動(dòng)
【發(fā)生的現(xiàn)象】
a,電機(jī)實(shí)際運(yùn)行位置相比較控制位置出錯(cuò)(或多或少)
b,電機(jī)找機(jī)械零點(diǎn)后,實(shí)際運(yùn)行位置依然錯(cuò)誤
c,電機(jī)運(yùn)行過程“咔咔作響”
d,電機(jī)在正常運(yùn)行,負(fù)載機(jī)構(gòu)不運(yùn)行
【解決措施】
a,檢查電機(jī)出軸鏈接是否有劃痕,人為鎖緊排除;
b,更換電機(jī)連軸器;
c,電機(jī)軸損壞,更換伺服電機(jī)。
2.8 電機(jī)剛性參數(shù)沒有調(diào)試恰當(dāng)
【發(fā)生的現(xiàn)象】
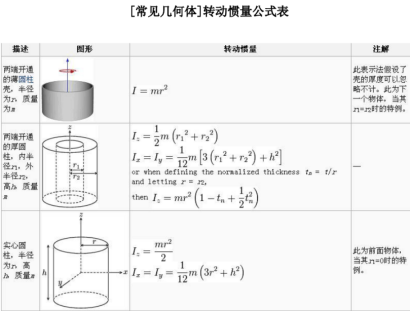
2.9 電機(jī)選型與負(fù)載慣量不匹配
【發(fā)生的現(xiàn)象】
a,電機(jī)低速運(yùn)行正常,高速運(yùn)行立即發(fā)生驅(qū)動(dòng)器報(bào)警
b,電機(jī)帶負(fù)載運(yùn)行時(shí),邊運(yùn)動(dòng)邊抖動(dòng),且抖動(dòng)停不下來
【解決措施】
a,重新選擇伺服電機(jī),在廠家指導(dǎo)下匹配負(fù)載慣量
b,重新設(shè)計(jì)傳動(dòng)機(jī)構(gòu),比如加大/減小減速機(jī) 咨詢電機(jī)廠家,多選擇一個(gè)“制動(dòng)電阻”,用于瀉放慣量不匹配出現(xiàn)剎車制動(dòng)能量
2.10 電機(jī)垂直安裝剎車控制不恰當(dāng)
【發(fā)生的現(xiàn)象】
a,電機(jī)上電時(shí),剎車沒有正常松開
b,電機(jī)遇到異常報(bào)警時(shí),剎車沒有剎住
c,電機(jī)在關(guān)閉使能信號(hào)時(shí),剎車沒有剎住
【解決措施】
a,如果剎車控制信號(hào)是控制器時(shí),請(qǐng)調(diào)整剎車控制時(shí)序
b,剎車信號(hào)控制權(quán),交給伺服驅(qū)動(dòng)器(伺服驅(qū)動(dòng)器對(duì)剎車控制時(shí)序最為精準(zhǔn))
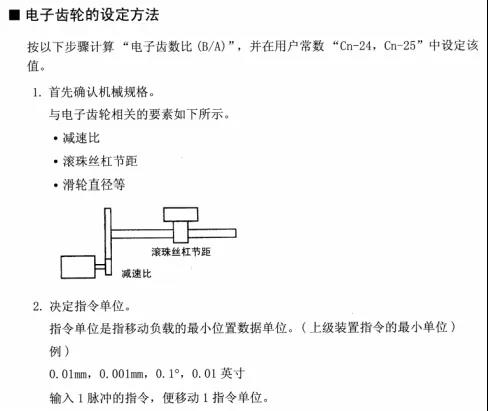
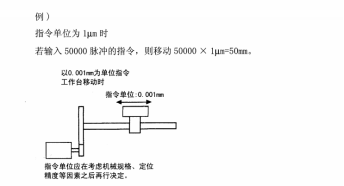
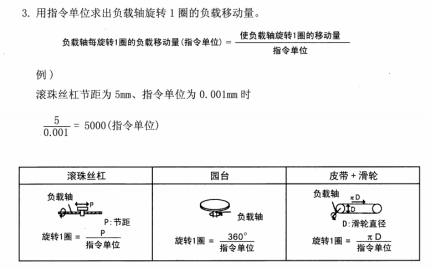
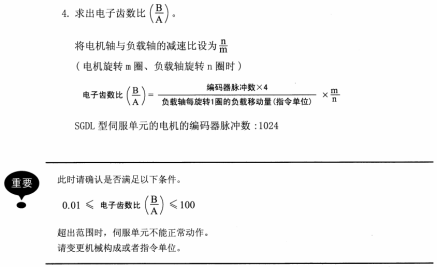
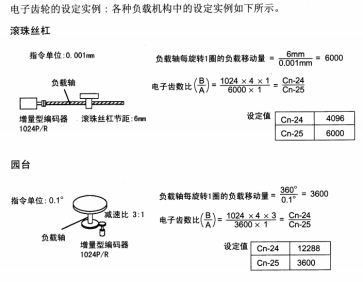
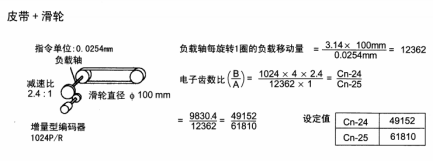
2.11 伺服驅(qū)動(dòng)電子齒輪比設(shè)定錯(cuò)誤
產(chǎn)品推薦:兩相步進(jìn)電機(jī)




產(chǎn)品推薦:無刷電機(jī)






產(chǎn)品推薦:兩相步進(jìn)驅(qū)動(dòng)器






產(chǎn)品推薦:直流無刷驅(qū)動(dòng)器






 地址 ADDRESS
地址 ADDRESS